Project information
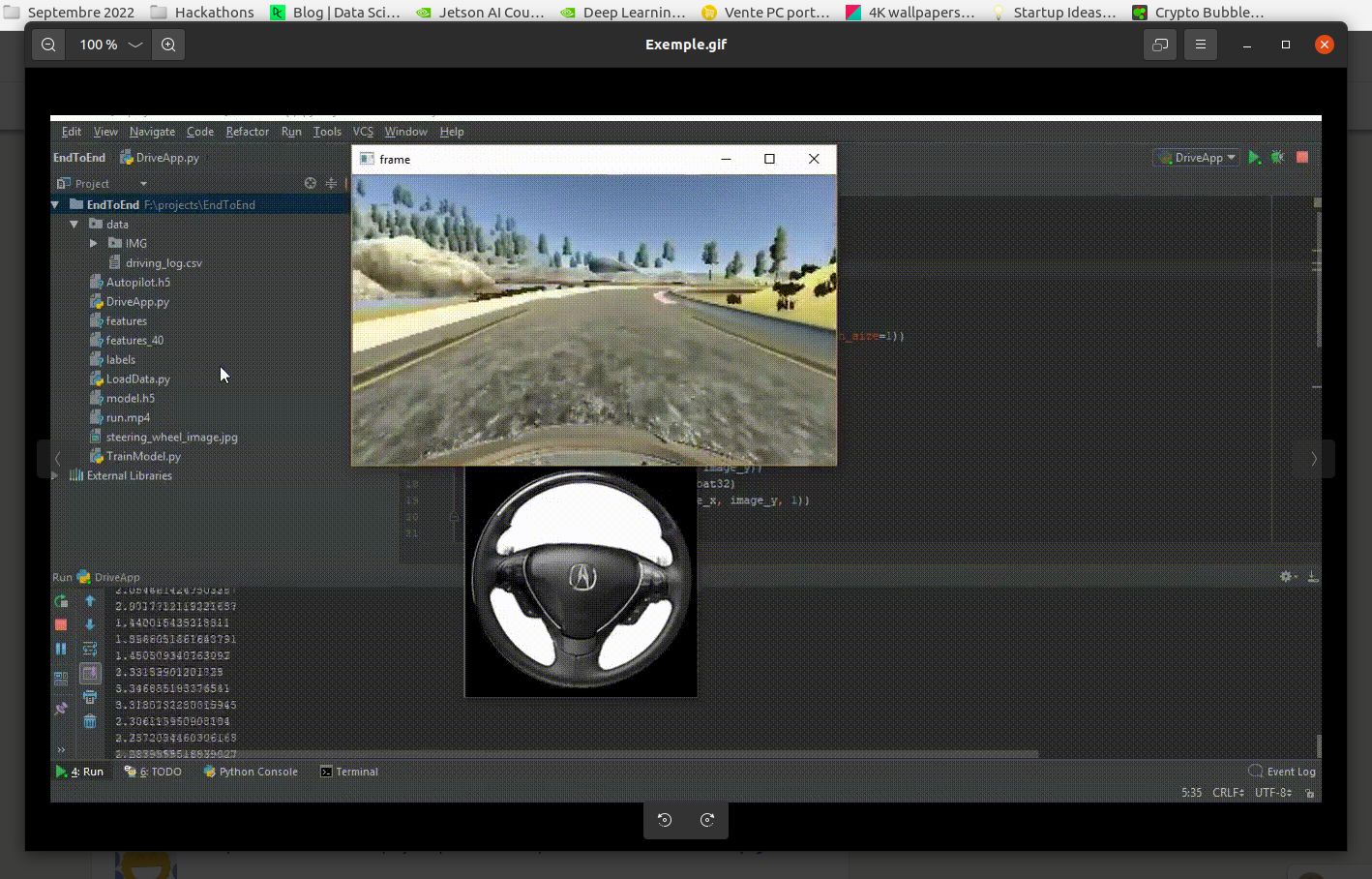
- 🎯 Objective:: The goal of the project was to train a Deep Network to replicate the human steering behavior while driving, thus being able to drive autonomously on a simulator provided by Udacity. To this purpose, the network takes as input the frame of the frontal camera (say, a roof-mounted camera) and predicts the steering direction at each instant.
- date: Sep 2022 - Oct 2022
- Github Link: Github Link
Description:
💡 Features:
- 𝐃𝐞𝐞𝐩 𝐋𝐞𝐚𝐫𝐧𝐢𝐧𝐠 𝐅𝐫𝐚𝐦𝐞𝐰𝐨𝐫𝐤: Utilizes Keras with Convolutional Neural Networks (CNNs), leveraging deep learning to process and interpret visual data for steering control.
- 𝐕𝐢𝐬𝐮𝐚𝐥 𝐈𝐧𝐩𝐮𝐭 𝐇𝐚𝐧𝐝𝐥𝐢𝐧𝐠: The network takes input from three different camera perspectives—frontal, left, and right—mounted on the vehicle, allowing it to understand and respond to varying road conditions and angles.
- 𝐑𝐞𝐚𝐥-𝐓𝐢𝐦𝐞 𝐒𝐭𝐞𝐞𝐫𝐢𝐧𝐠 𝐏𝐫𝐞𝐝𝐢𝐜𝐭𝐢𝐨𝐧:
-Direct Control: Predicts steering directions frame by frame based on the visual input, enabling dynamic and responsive vehicle control.
-Behavioral Cloning: The network learns directly from human driving behavior, effectively cloning the steering actions based on visual cues.
Python and Keras: Built with Python and utilizing the Keras library for neural network construction, facilitating an efficient and powerful computational framework suited for real-time applications.
- 𝐓𝐫𝐚𝐢𝐧𝐢𝐧𝐠 𝐃𝐚𝐭𝐚 𝐀𝐜𝐪𝐮𝐢𝐬𝐢𝐭𝐢𝐨𝐧:
-Simulator Training Mode: Collects data in a controlled environment where a human driver navigates the simulator, capturing both the visual frames and the corresponding steering directions.
-Pre-compiled Dataset: Utilizes Udacity’s pre-built dataset which includes 8036 samples with images from three different camera views and their respective steering directions, simplifying the initial setup and training processes.
- 𝐀𝐮𝐭𝐨𝐧𝐨𝐦𝐨𝐮𝐬 𝐒𝐢𝐦𝐮𝐥𝐚𝐭𝐢𝐨𝐧: Once trained, the network can independently drive the car in the Udacity simulator, interpreting road scenarios and making steering adjustments without human input.